Current research in enactive, embodied cognition is built on two central ideas: 1) Physical interaction with and exploration of the world allows an agent to acquire and extend intrinsically grounded, cognitive representations and, 2) representations built from such interactions are much better adapted to guiding behaviour than human crafted rules or control logic. Exploration and discriminative learning, however are relatively slow processes. Humans, on the other hand, are able to rapidly create new concepts and react to unanticipated situations using their experience. “Imagining” and “internal simulation”, hence generative mechanisms which rely on prior knowledge are employed to predict the immediate future and are key in increasing bandwidth and speed of cognitive development. Current artificial cognitive systems are limited in this respect as they do not yet make efficient use of such generative mechanisms for the extension of their cognitive properties.
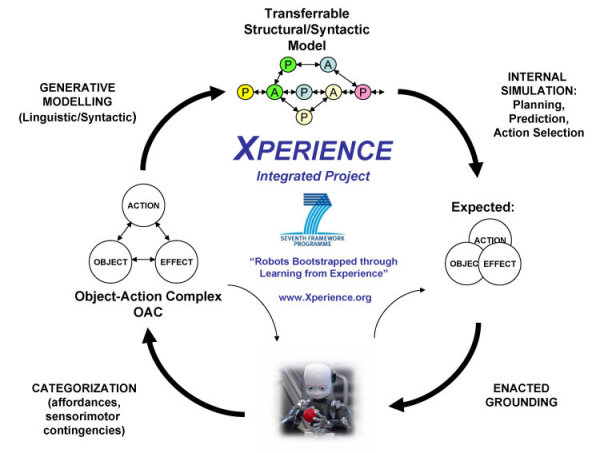
Solution The Xperience project will address this problem by structural bootstrapping, an idea taken from child language acquisition research. Structural bootstrapping is a method of building generative models, leveraging existing experience to predict unexplored action effects and to focus the hypothesis space for learning novel concepts. This developmental approach enables rapid generalization and acquisition of new knowledge and skills from little additional training data. Moreover, thanks to shared concepts, structural bootstrapping enables enactive agents to communicate effectively with each other and with humans. Structural bootstrapping can be employed at all levels of cognitive development (e.g. sensorimotor, planning, communication).
Xperience will demonstrate that state‐of‐the‐art enactive systems can be significantly extended by using structural bootstrapping to generate new knowledge. This process is founded on explorative knowledge acquisition, and subsequently validated through experience‐based generalization.
Xperience will implement, adapt, and extend a complete robot system for automating introspective, predictive, and interactive understanding of actions and dynamic situations. Xperience will evaluate, and benchmark this approach on existing state‐of‐the‐art humanoid robots, integrating the different components into a complete system that can interact with humans.
Expected Impact By equipping embodied artificial agents with the means to exploit prior experience via generative inner models, the methods to be developed here are expected to impact a wide range of autonomous robotics applications that benefit from efficient learning through exploration, predictive reasoning and external guidance.